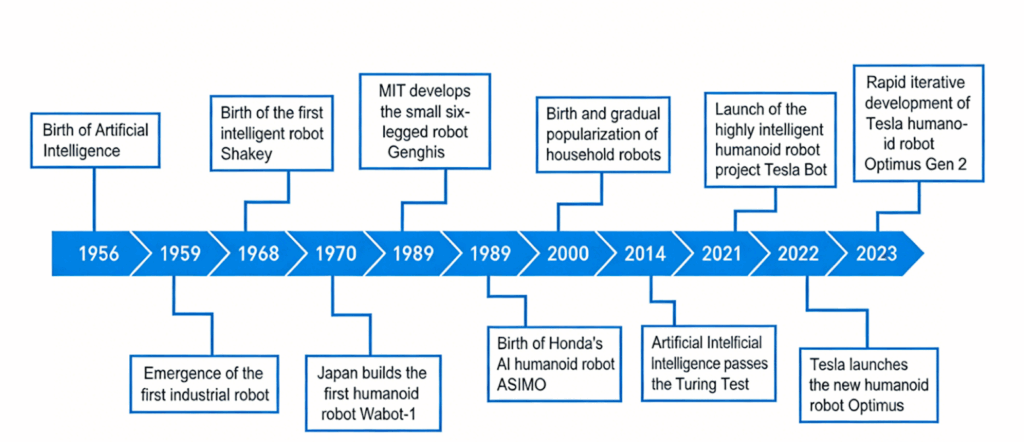
人形机器人及其发展史
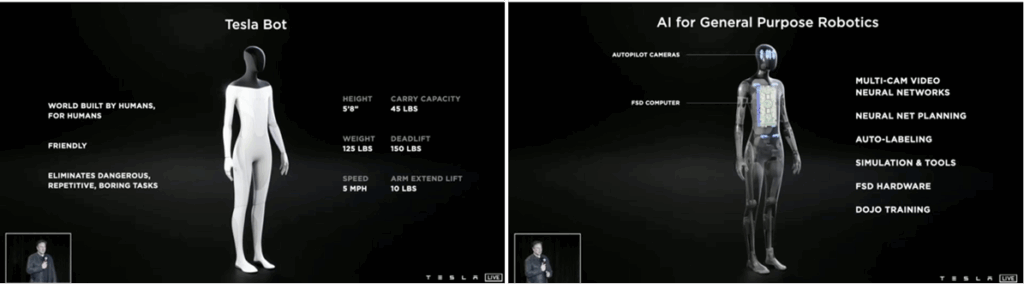
人形机器人是指具有自主性和第一人称智能的机器人。本质上,它们是能够感知环境并与之互动、自主规划、做出决策并采取行动,且具备实际执行能力的机器人。
智能机器人的核心目标是能够理解人类语言,分解任务,规划子任务,在移动中识别物体,与环境互动,并最终完成分配的任务。
人形机器人的结构分解
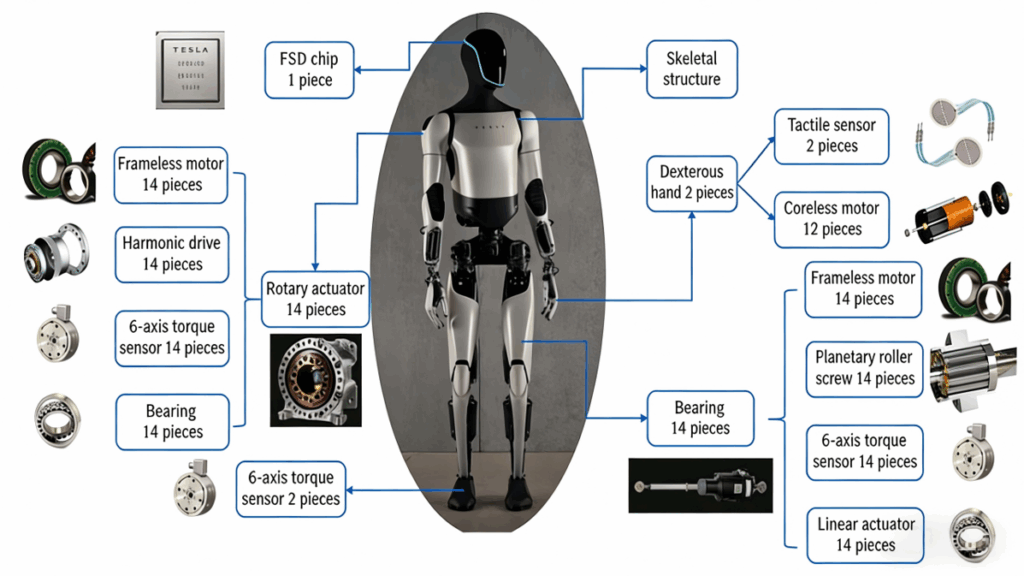
永磁材料在人形机器人中的应用(无框架电机)
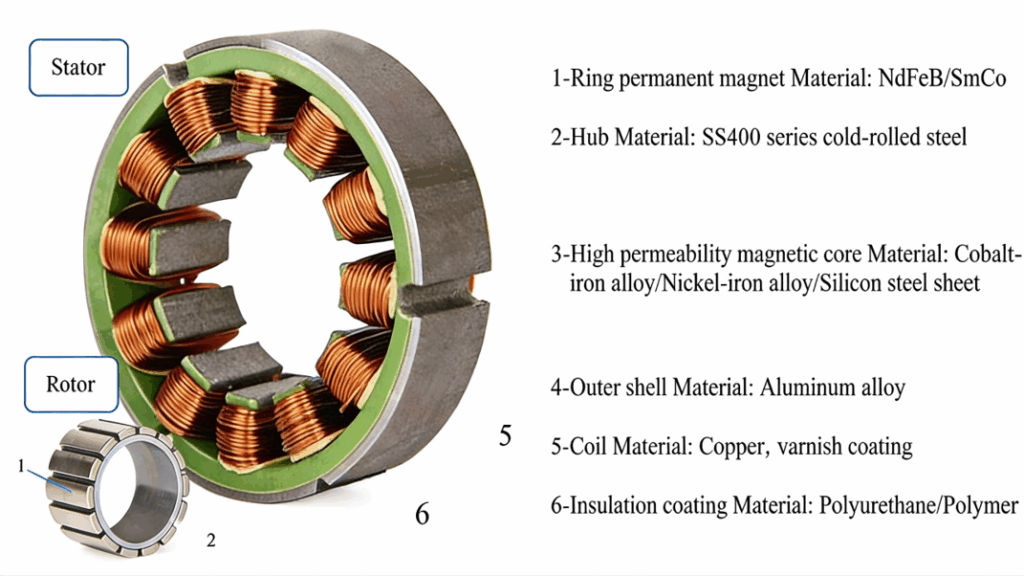
无框电机:执行器运行的动力源
无框电机是人形机器人执行器的动力源。它们属于伺服电机的一种,用于驱动人形机器人的关节和运动系统。无框电机通过取消传统的电机外壳和轴(在某些设计中还取消了铁芯结构),实现了紧凑轻巧的结构,从而提高了功率密度,同时还具有低能耗和低摩擦的特性。
无框电机仅由定子和转子组成。转子是一个装有永磁体的旋转钢环组件,直接安装在电机轴上。定子包含一个高磁导率磁芯,磁芯周围缠绕着产生电磁力的铜线圈,定子紧凑地集成在电机壳体的主体内。
永磁材料在人形机器人中的应用(无芯电机)
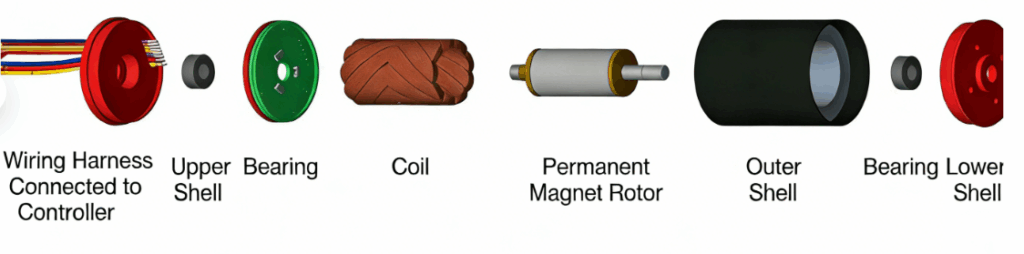
无芯电机是直流永磁伺服电机,属于微型特种电机(尺寸一般不超过40毫米)。无芯电机具有体积小、效率高、噪音低等优点,并具有出色的节能性能、响应迅速且控制便捷、运行稳定等特点,展现出明显的技术优势。
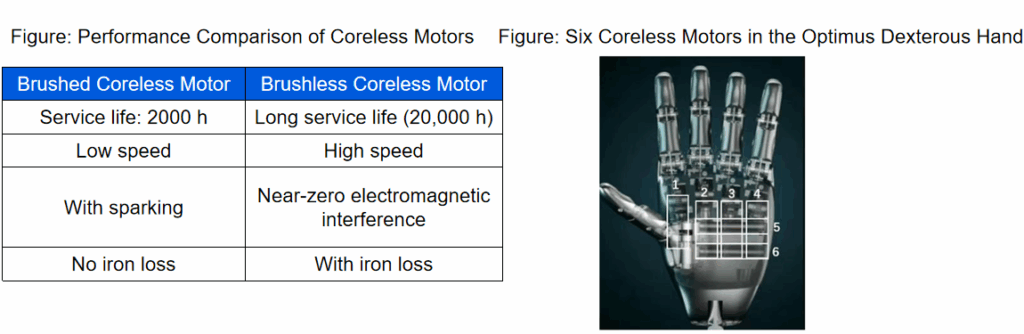
例如,特斯拉的每一只灵巧的手 擎天柱 它配备了六个无芯电机驱动关节,使手部具有 11 个自由度,从而能够进行更灵活、更精确的操作。
无芯电机的主要部件包括线圈、转子、外壳和霍尔传感器。线圈由漆包线绕制而成,漆包线由铜和绝缘材料构成。转子由永磁材料和铁芯组成,其中永磁材料的价值最高。
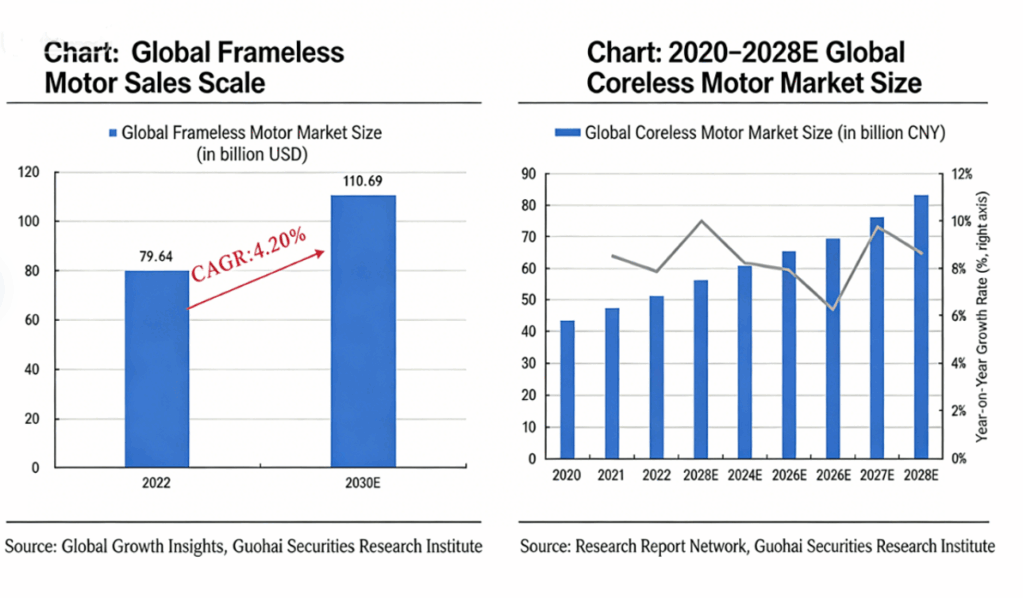
全球无框电机和无芯(空心杯)电机市场规模
机器人关节需要体积小、扭矩大、响应速度快的电机。无框力矩电机重量轻、功率大,能够在低速下提供更高的扭矩,因此非常适合人形机器人的需求。无芯电机尺寸紧凑、性能优异,尤其适用于灵巧的手部。