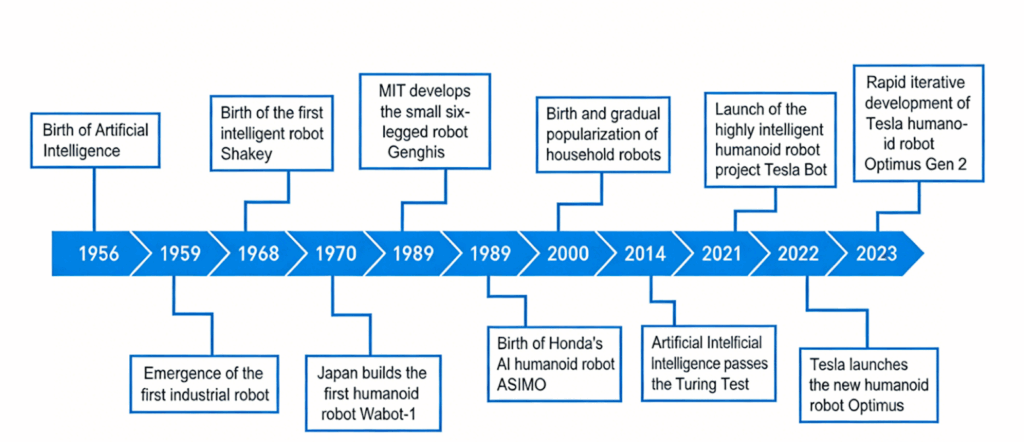
Robôs Humanoides e sua História de Desenvolvimento
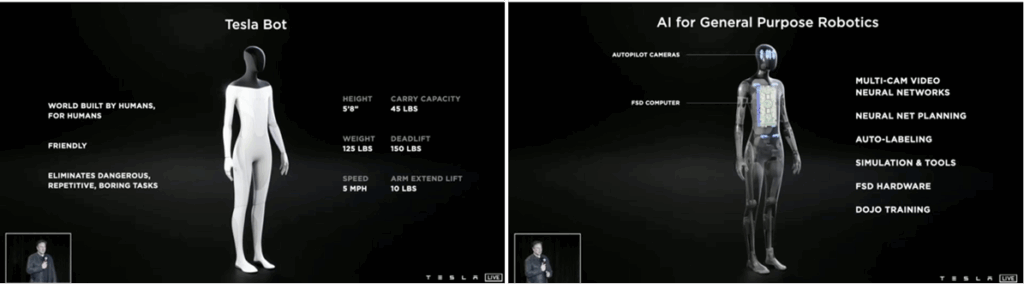
Robôs humanoides são robôs com autonomia e inteligência em primeira pessoa. Essencialmente, são robôs capazes de perceber e interagir com o ambiente, planejar, tomar decisões e executar ações de forma autônoma, com capacidade real de execução.
O principal objetivo dos robôs inteligentes é ser capaz de compreender a linguagem humana, decompor tarefas, planejar subtarefas, reconhecer objetos em movimento, interagir com o ambiente e, por fim, concluir as tarefas atribuídas.
Colapso estrutural de robôs humanoides
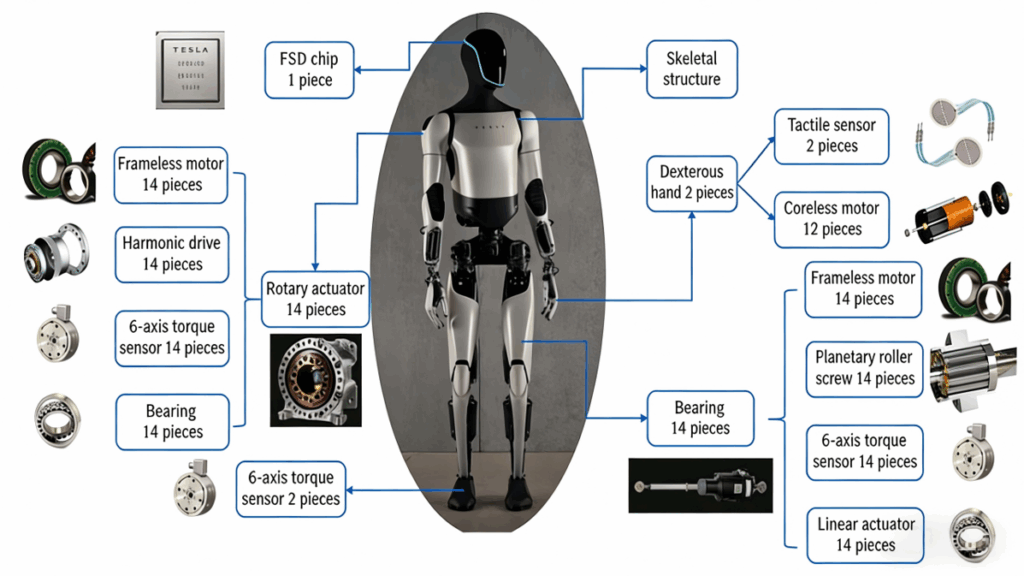
Aplicação de materiais de ímã permanente em robôs humanoides (motores sem estrutura)
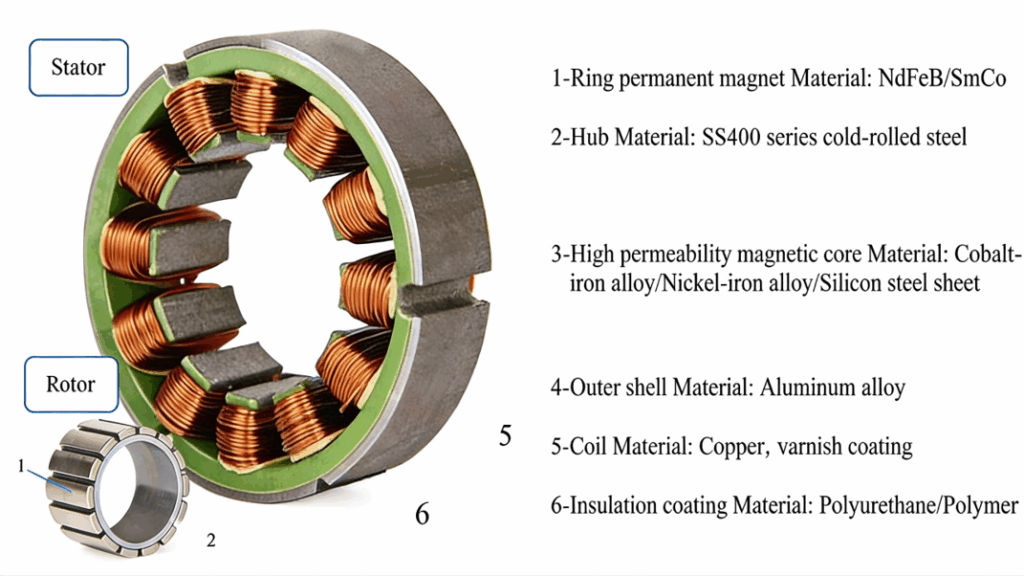
Motor sem carcaça: fonte de energia para operação do atuador
Os motores sem carcaça são a fonte de energia que aciona os atuadores de robôs humanoides. Eles pertencem a um tipo de servomotor e são usados para acionar as articulações e os sistemas de movimento desses robôs. Ao eliminar a carcaça e o eixo tradicionais do motor (e, em alguns projetos, a estrutura com núcleo de ferro), os motores sem carcaça apresentam uma estrutura compacta e leve, permitindo maior densidade de potência, além de baixo consumo de energia e baixo atrito.
Um motor sem carcaça consiste apenas em um estator e um rotor. O rotor é um conjunto de anéis de aço rotativos equipado com ímãs permanentes e montado diretamente no eixo da máquina. O estator contém um núcleo magnético de alta permeabilidade envolto por enrolamentos de cobre que geram força eletromagnética e é integrado de forma compacta ao corpo principal da carcaça da máquina.
Aplicação de materiais de ímã permanente em robôs humanoides (motores sem núcleo)
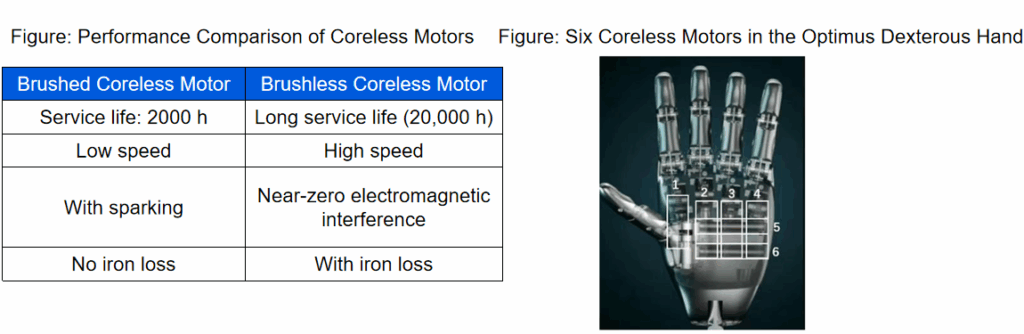
Os motores sem núcleo são servomotores CC de ímã permanente e pertencem à categoria de micromotores especiais (com dimensões geralmente não superiores a 40 mm). Os motores sem núcleo caracterizam-se pelo tamanho reduzido, alta eficiência e baixo ruído, oferecendo excelente desempenho em termos de economia de energia, controle altamente responsivo e conveniente, e operação estável, demonstrando claras vantagens tecnológicas.
Por exemplo, cada mão hábil de Tesla Ótimo É equipada com seis juntas acionadas por motores sem núcleo, proporcionando à mão 11 graus de liberdade e permitindo uma manipulação mais flexível e precisa.
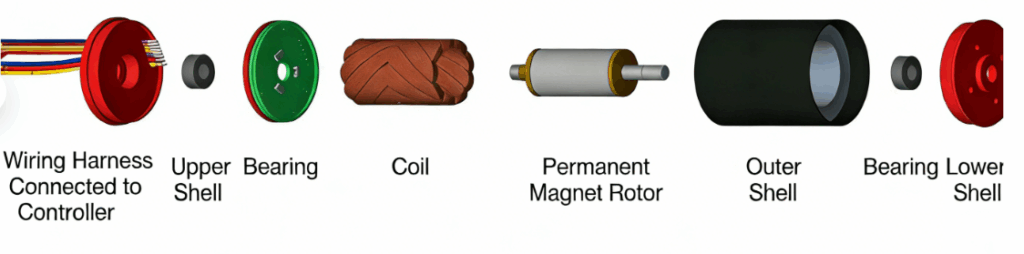
Os principais componentes de um motor sem núcleo incluem a bobina, o rotor, a carcaça e os sensores Hall. A bobina é enrolada com fio esmaltado, composto de cobre e materiais isolantes. O rotor é composto de materiais magnéticos permanentes e um núcleo de ferro, sendo o material magnético permanente o componente de maior valor.
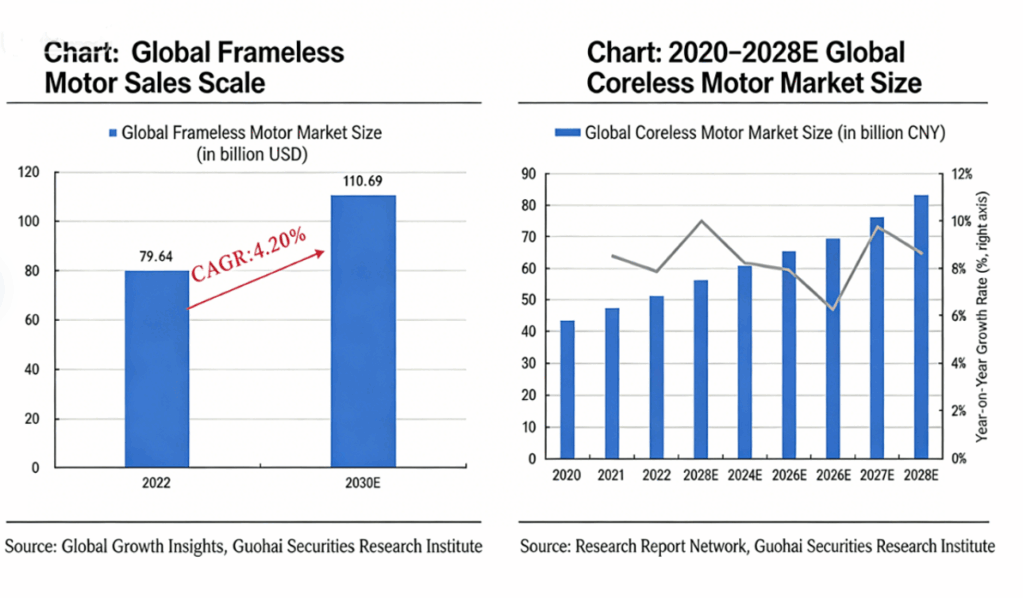
Tamanho do mercado global de motores sem carcaça e motores sem núcleo (copo oco)
As articulações de robôs exigem motores de tamanho reduzido, alto torque e resposta rápida. Os motores de torque sem carcaça são leves e potentes, capazes de fornecer torque muito maior em baixas velocidades, o que os torna ideais para as necessidades de robôs humanoides. Os motores sem núcleo apresentam tamanho compacto e excelente desempenho, sendo particularmente adequados para mãos com alta destreza.