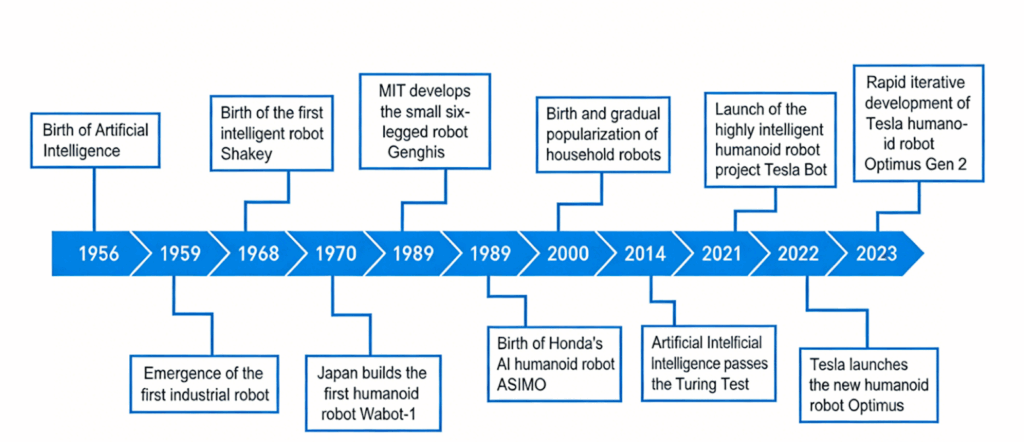
Robot umanoidi e la loro storia di sviluppo
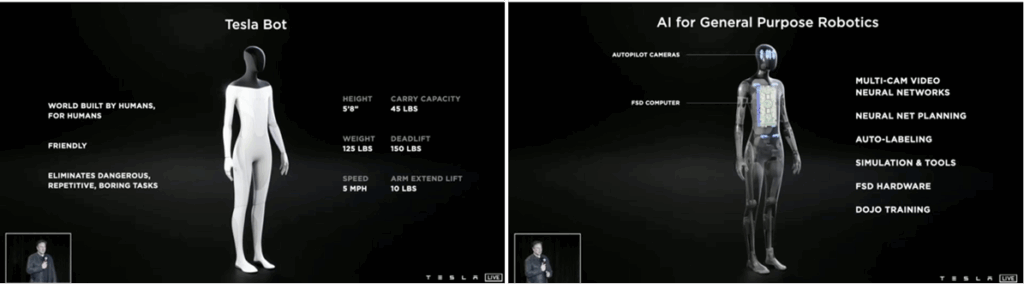
I robot umanoidi sono robot dotati di autonomia e intelligenza in prima persona. In sostanza, sono robot in grado di percepire e interagire con l’ambiente circostante, pianificando, prendendo decisioni e intraprendendo azioni in modo autonomo, con capacità di esecuzione effettiva.
L’obiettivo principale dei robot intelligenti è quello di essere in grado di comprendere il linguaggio umano, scomporre compiti, pianificare sotto-compiti, riconoscere oggetti in movimento, interagire con l’ambiente e, infine, completare i compiti assegnati.
Analisi strutturale dei robot umanoidi
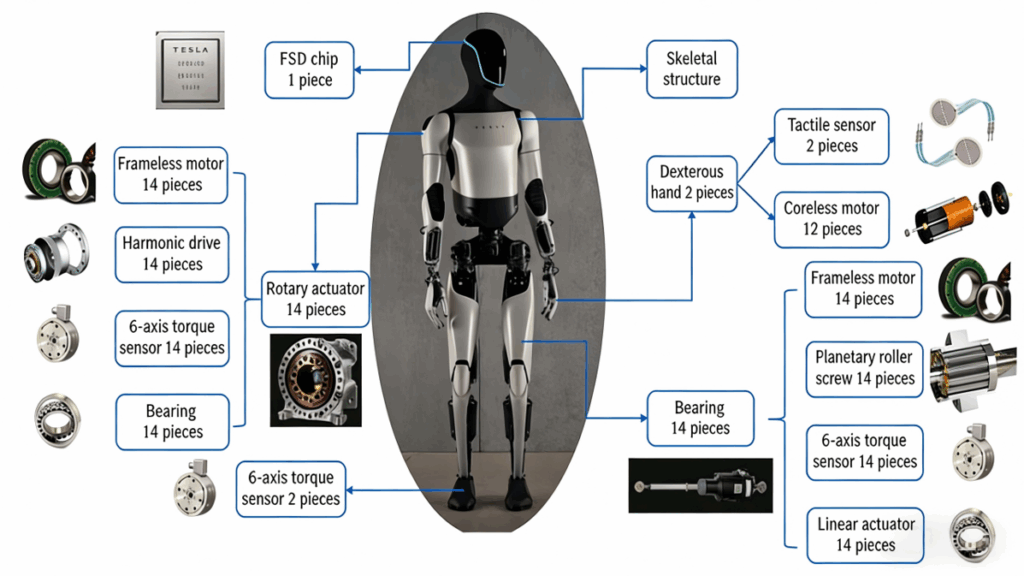
Applicazione di materiali magnetici permanenti nei robot umanoidi (motori senza telaio)
Motore senza telaio: fonte di alimentazione per il funzionamento dell’attuatore
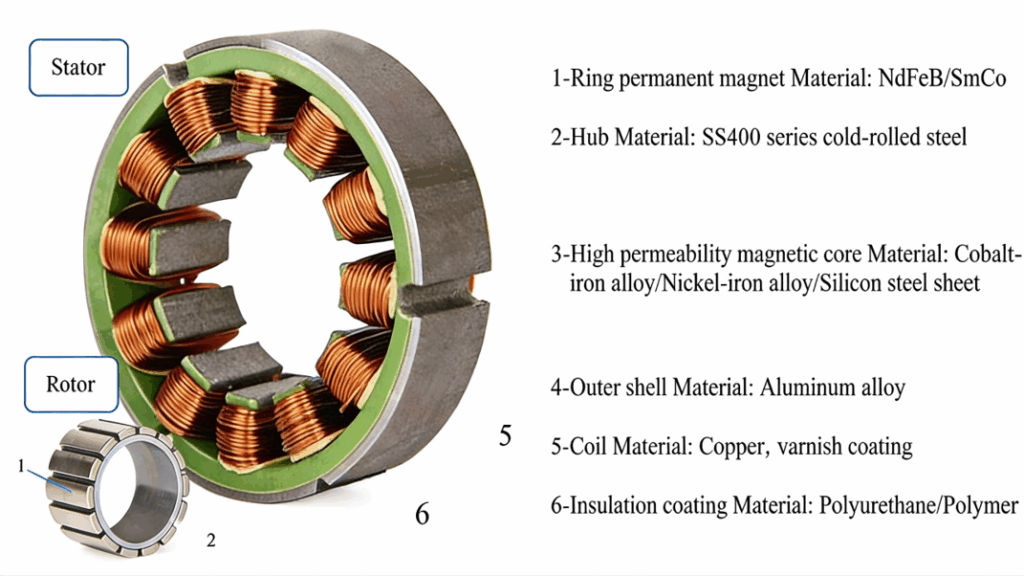
I motori frameless sono la fonte di energia che aziona gli attuatori dei robot umanoidi. Appartengono a una tipologia di servomotore e vengono utilizzati per azionare le articolazioni e i sistemi di movimento dei robot umanoidi. Eliminando il tradizionale alloggiamento e albero motore (e in alcuni modelli la struttura con nucleo in ferro), i motori frameless presentano una struttura compatta e leggera, che consente una maggiore densità di potenza, oltre a bassi consumi energetici e bassi attriti.
Un motore frameless è costituito solo da uno statore e un rotore. Il rotore è un gruppo rotante ad anello in acciaio dotato di magneti permanenti ed è montato direttamente sull’albero della macchina. Lo statore contiene un nucleo magnetico ad alta permeabilità circondato da avvolgimenti in rame che generano forza elettromagnetica ed è integrato in modo compatto nel corpo principale della macchina.
Applicazione di materiali magnetici permanenti nei robot umanoidi (motori senza nucleo)
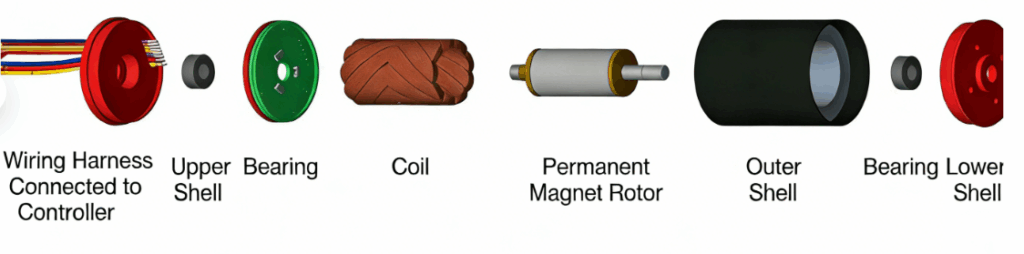
I motori coreless sono servomotori CC a magneti permanenti e appartengono alla categoria dei micromotori speciali (con dimensioni generalmente non superiori a 40 mm). I motori coreless sono caratterizzati da dimensioni ridotte, elevata efficienza e bassa rumorosità, e offrono eccezionali prestazioni di risparmio energetico, un controllo altamente reattivo e pratico e un funzionamento stabile, dimostrando evidenti vantaggi tecnologici.
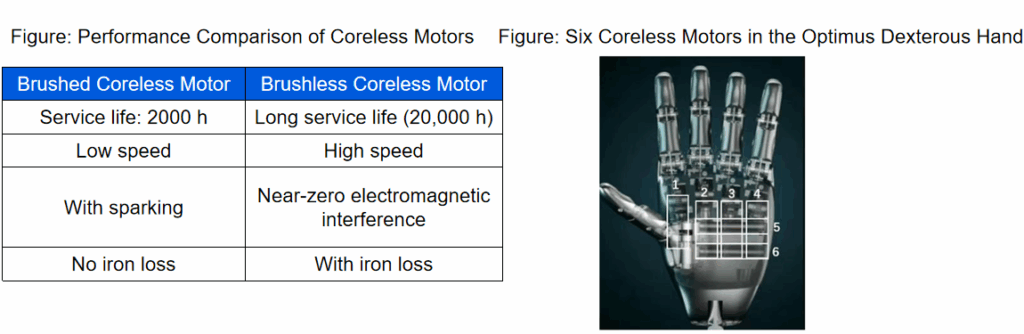
Ad esempio, ogni mano abile di Tesla Optimus è dotato di sei giunti motorizzati senza nucleo, che forniscono alla mano 11 gradi di libertà e consentono una manipolazione più flessibile e precisa.
I componenti principali di un motore senza nucleo includono la bobina, il rotore, l’alloggiamento e i sensori Hall. La bobina è avvolta con filo smaltato, composto da rame e materiali isolanti. Il rotore è composto da materiali magnetici permanenti e da un nucleo di ferro, con il materiale magnetico permanente che rappresenta il valore più elevato tra i componenti.
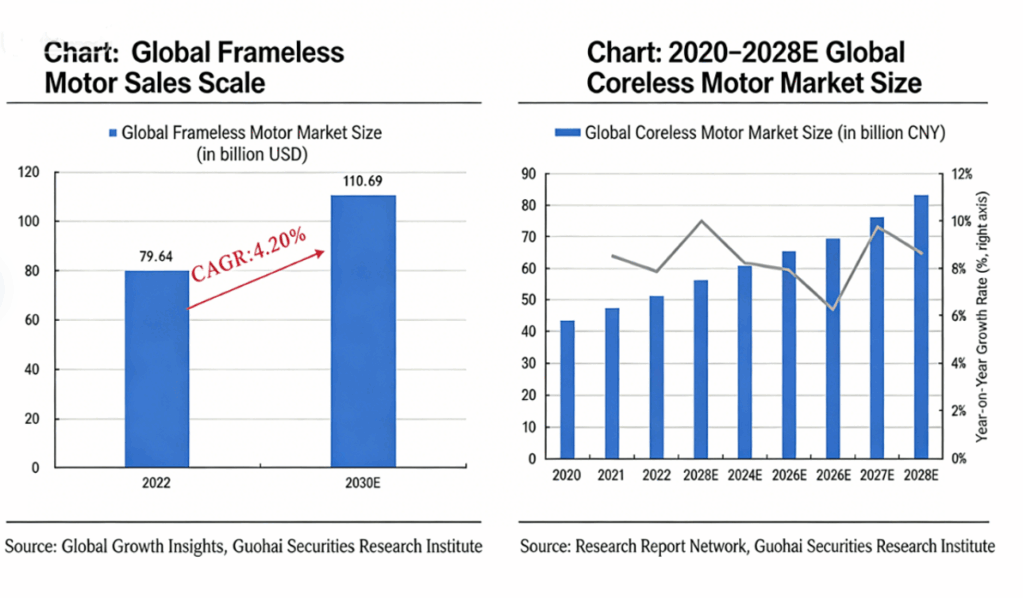
Dimensioni del mercato globale dei motori senza telaio e dei motori senza nucleo (a tazza cava)
I giunti robotici richiedono motori di piccole dimensioni, coppia elevata e risposta rapida. I motori torque frameless sono leggeri e potenti, e sono in grado di fornire una coppia molto più elevata a basse velocità, il che li rende adatti ai requisiti dei robot umanoidi. I motori coreless presentano dimensioni compatte e prestazioni eccellenti, rendendoli particolarmente adatti a mani agili.