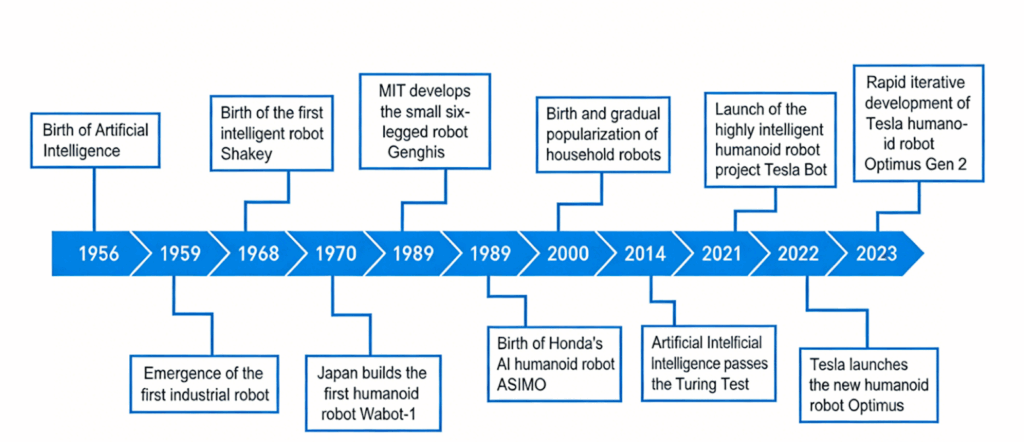
Humanoide Roboter und ihre Entwicklungsgeschichte
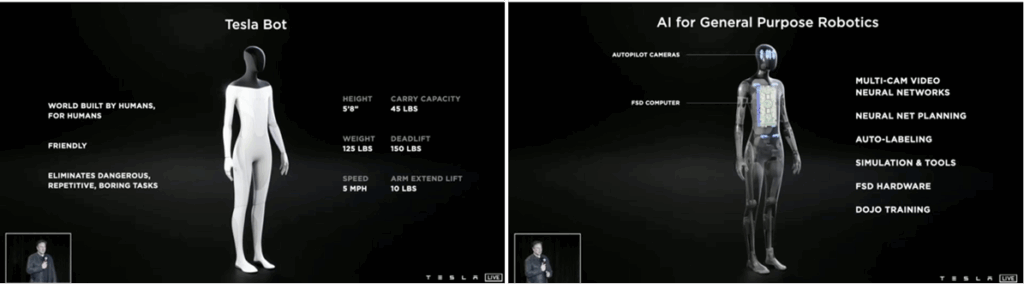
Humanoide Roboter sind Roboter mit Autonomie und intuitiver Intelligenz. Im Wesentlichen handelt es sich um Roboter, die ihre Umgebung wahrnehmen und mit ihr interagieren, selbstständig planen, Entscheidungen treffen und handeln können und über die notwendigen Ausführungsfähigkeiten verfügen.
Das Hauptziel intelligenter Roboter ist es, die menschliche Sprache zu verstehen, Aufgaben zu zerlegen, Teilaufgaben zu planen, Objekte während der Bewegung zu erkennen, mit der Umgebung zu interagieren und letztendlich die zugewiesenen Aufgaben zu erledigen.
Struktureller Zusammenbruch humanoider Roboter
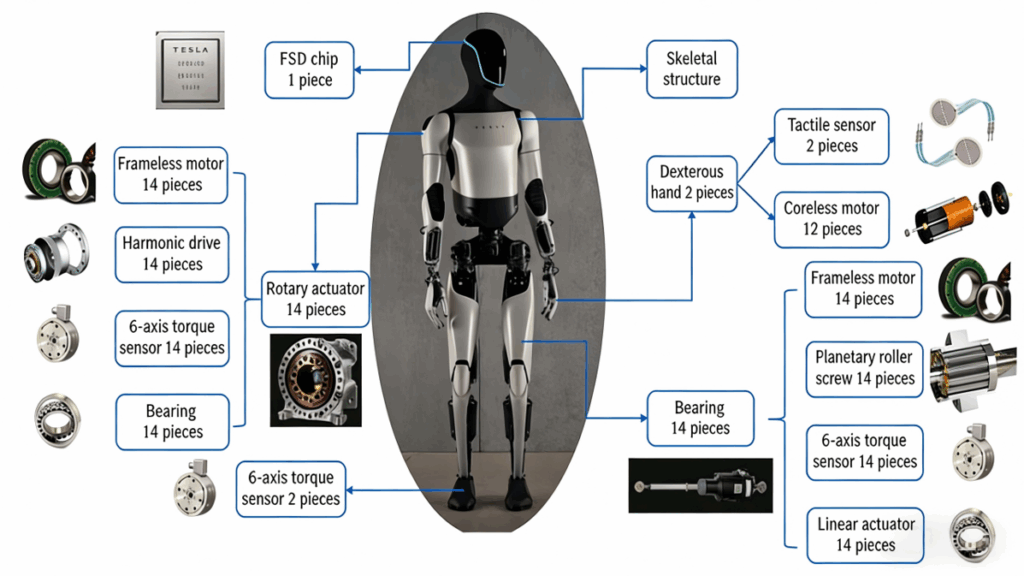
Anwendung von Permanentmagnetmaterialien in humanoiden Robotern (rahmenlose Motoren)
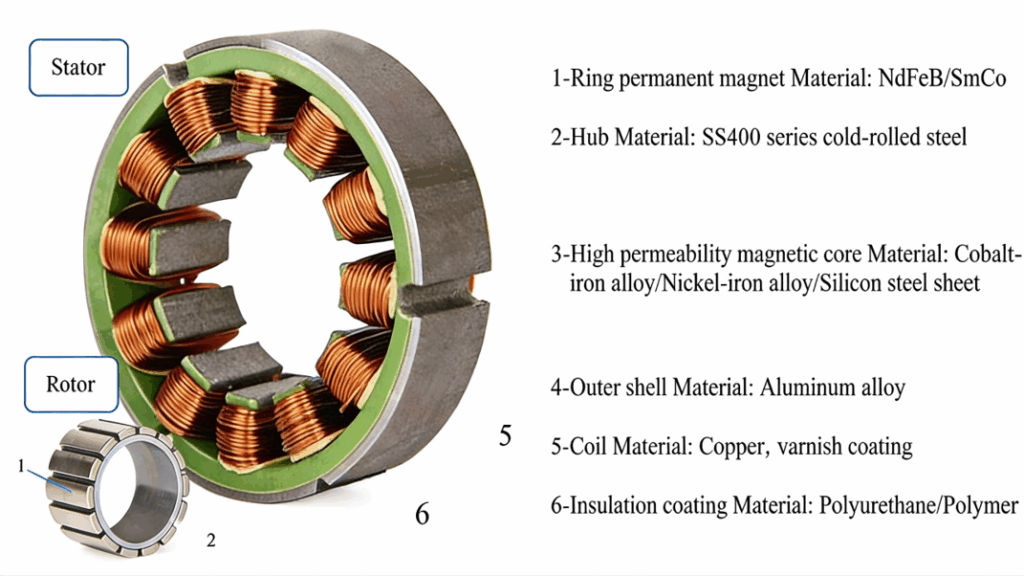
Rahmenloser Motor: Energiequelle für den Aktorbetrieb
Rahmenlose Motoren treiben die Aktuatoren humanoider Roboter an. Sie gehören zur Gruppe der Servomotoren und werden zur Betätigung der Gelenke und Bewegungssysteme humanoider Roboter eingesetzt. Durch den Verzicht auf das herkömmliche Motorgehäuse und die Welle (und in einigen Ausführungen auch auf den Eisenkern) zeichnen sich rahmenlose Motoren durch eine kompakte und leichte Bauweise aus, die eine höhere Leistungsdichte sowie einen geringen Energieverbrauch und niedrige Reibungswerte ermöglicht.
Ein rahmenloser Motor besteht lediglich aus einem Stator und einem Rotor. Der Rotor ist ein rotierender Stahlring mit Permanentmagneten, der direkt auf der Maschinenwelle montiert ist. Der Stator enthält einen Magnetkern mit hoher Permeabilität, der von Kupferwicklungen umgeben ist, welche elektromagnetische Kräfte erzeugen, und ist kompakt in das Maschinengehäuse integriert.
Anwendung von Permanentmagnetmaterialien in humanoiden Robotern (kernlose Motoren)
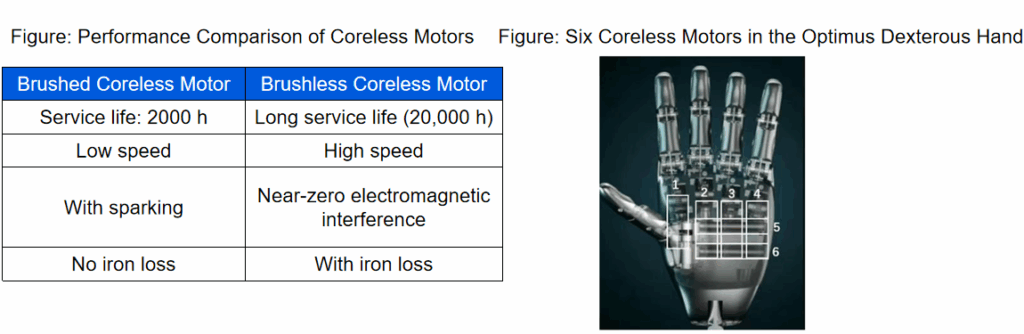
Kernlose Motoren sind Gleichstrom-Servomotoren mit Permanentmagneten und gehören zur Kategorie der Mikro-Spezialmotoren (mit Abmessungen in der Regel maximal 40 mm). Sie zeichnen sich durch geringe Größe, hohen Wirkungsgrad und niedrige Geräuschentwicklung aus und bieten hervorragende Energieeinsparung, ein schnelles und komfortables Ansprechverhalten sowie einen stabilen Betrieb – klare technologische Vorteile.
Zum Beispiel jede geschickte Hand von Tesla Optimus ist mit sechs kernlosen, motorbetriebenen Gelenken ausgestattet, die der Hand elf Freiheitsgrade verleihen und eine flexiblere und präzisere Manipulation ermöglichen.
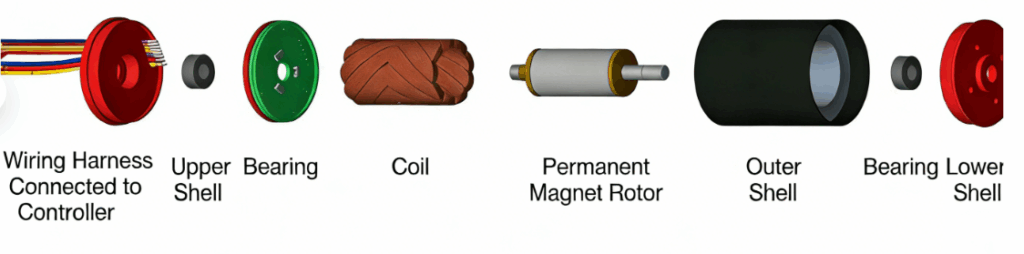
Die Hauptkomponenten eines kernlosen Motors sind Spule, Rotor, Gehäuse und Hall-Sensoren. Die Spule ist mit lackisoliertem Draht gewickelt, der aus Kupfer und Isoliermaterialien besteht. Der Rotor besteht aus Permanentmagneten und einem Eisenkern, wobei der Permanentmagnet den größten Anteil der Komponenten ausmacht.
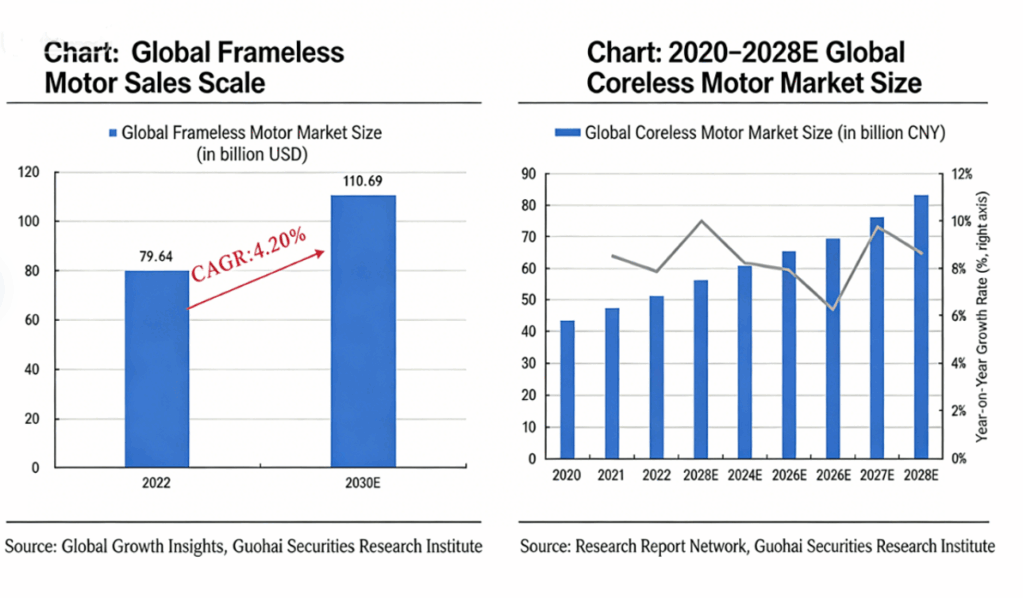
Weltmarktgröße für rahmenlose Motoren und kernlose (Hohlbecher-)Motoren
Robotergelenke benötigen Motoren mit geringer Größe, hohem Drehmoment und schneller Reaktionszeit. Rahmenlose Drehmomentmotoren sind leicht und leistungsstark und liefern ein deutlich höheres Drehmoment bei niedrigen Drehzahlen, wodurch sie sich ideal für die Anforderungen humanoider Roboter eignen. Kernlose Motoren zeichnen sich durch ihre kompakte Bauweise und hervorragende Leistung aus und sind daher besonders für Roboterhände geeignet.