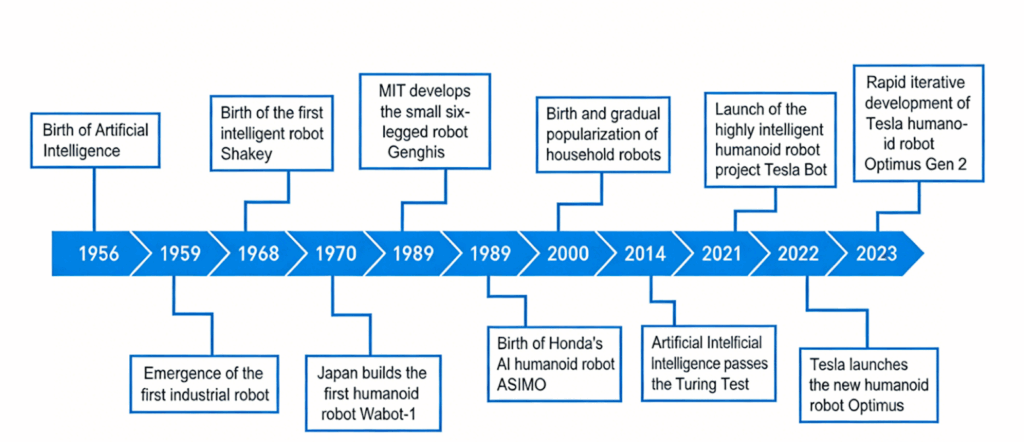
Robots humanoides y su historia de desarrollo
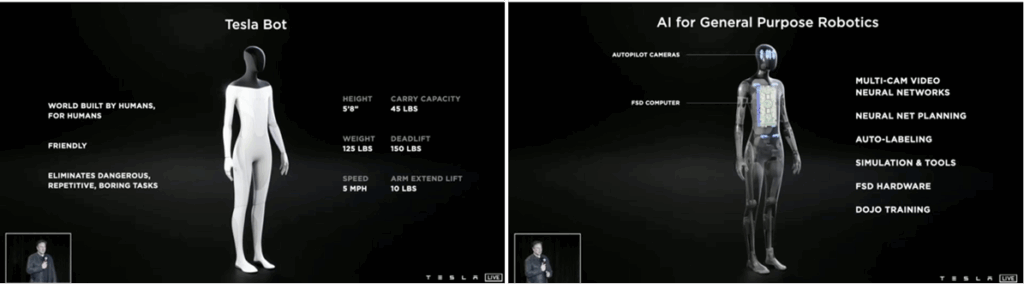
Los robots humanoides son robots con autonomía e inteligencia en primera persona. En esencia, son robots capaces de percibir e interactuar con su entorno, planificar, tomar decisiones y actuar de forma autónoma, con capacidad de ejecución real.
El objetivo principal de los robots inteligentes es poder comprender el lenguaje humano, descomponer tareas, planificar subtareas, reconocer objetos en movimiento, interactuar con el entorno y, en última instancia, completar las tareas asignadas.
Desglose estructural de los robots humanoides
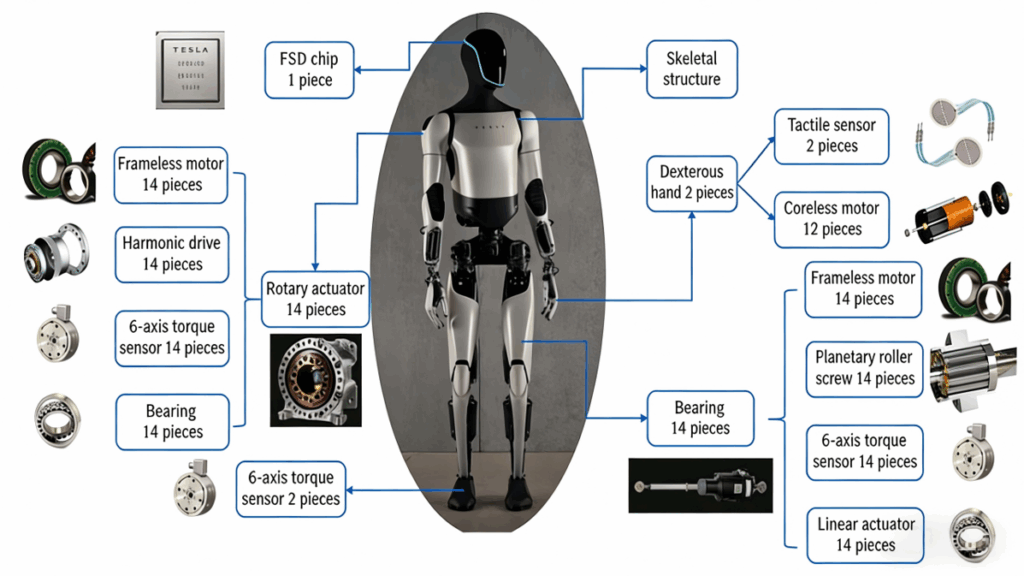
Aplicación de materiales de imán permanente en robots humanoides (motores sin marco)
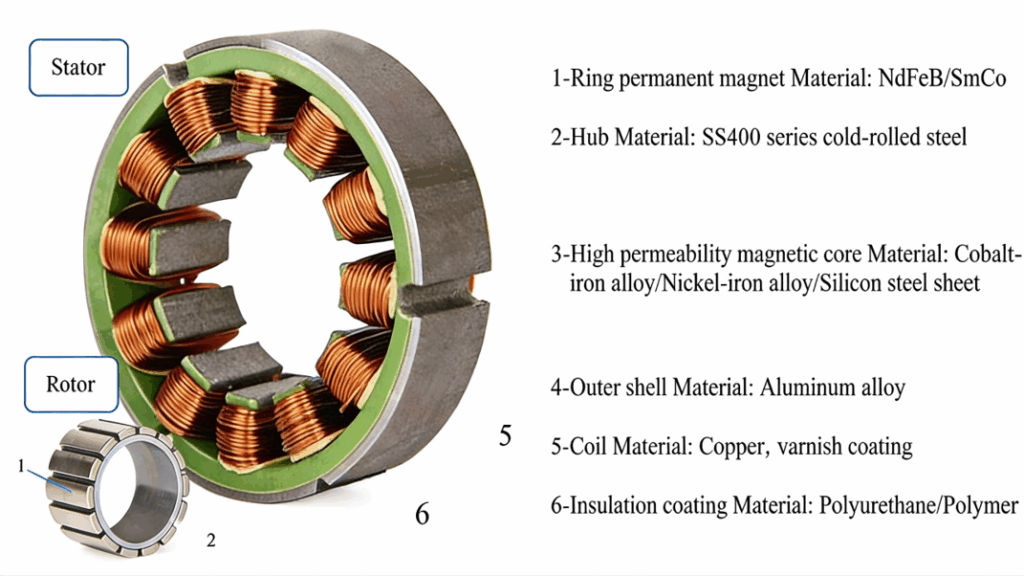
Motor sin marco: fuente de energía para el funcionamiento del actuador
Los motores sin marco son la fuente de energía que impulsa los actuadores de los robots humanoides. Pertenecen a un tipo de servomotor y se utilizan para accionar las articulaciones y los sistemas de movimiento de los robots humanoides. Al prescindir de la carcasa y el eje del motor tradicionales (y, en algunos diseños, de la estructura de núcleo de hierro), los motores sin marco presentan una estructura compacta y ligera, lo que permite una mayor densidad de potencia, así como un bajo consumo de energía y características de baja fricción.
Un motor sin carcasa consta únicamente de un estator y un rotor. El rotor es un conjunto de anillo de acero giratorio equipado con imanes permanentes y montado directamente sobre el eje de la máquina. El estator contiene un núcleo magnético de alta permeabilidad rodeado de bobinados de cobre que generan fuerza electromagnética y está integrado de forma compacta en el cuerpo principal de la carcasa de la máquina.
Aplicación de materiales de imán permanente en robots humanoides (motores sin núcleo)
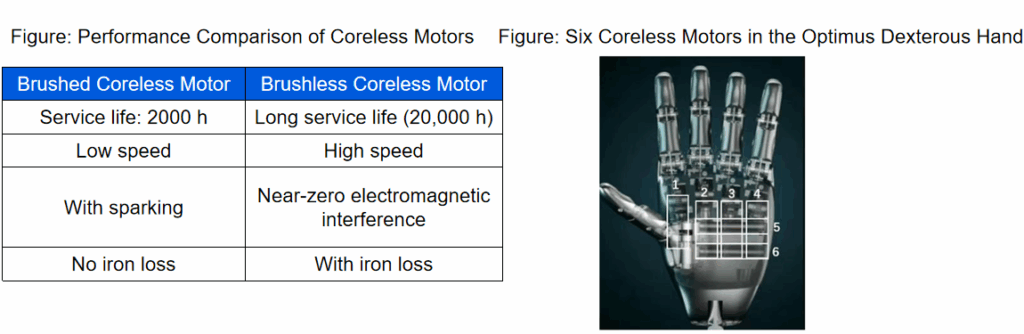
Los motores sin núcleo son servomotores de CC de imán permanente y pertenecen a la categoría de micromotores especiales (cuyas dimensiones generalmente no superan los 40 mm). Se caracterizan por su pequeño tamaño, alta eficiencia y bajo nivel de ruido, además de ofrecer un excelente rendimiento de ahorro de energía, un control ágil y práctico, y un funcionamiento estable, lo que demuestra claras ventajas tecnológicas.
Por ejemplo, cada mano diestra de Tesla Optimus Está equipado con seis articulaciones accionadas por motor sin núcleo, lo que proporciona a la mano 11 grados de libertad y permite una manipulación más flexible y precisa.
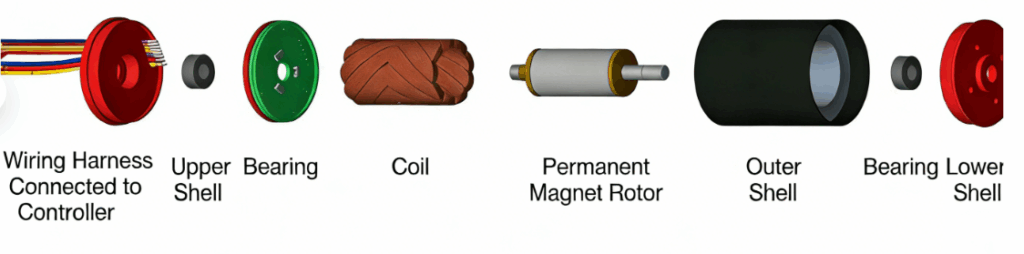
Los componentes principales de un motor sin núcleo incluyen la bobina, el rotor, la carcasa y los sensores Hall. La bobina está enrollada con alambre esmaltado, compuesto de cobre y materiales aislantes. El rotor está compuesto de materiales magnéticos permanentes y un núcleo de hierro, siendo el material de imán permanente el de mayor valor entre los componentes.
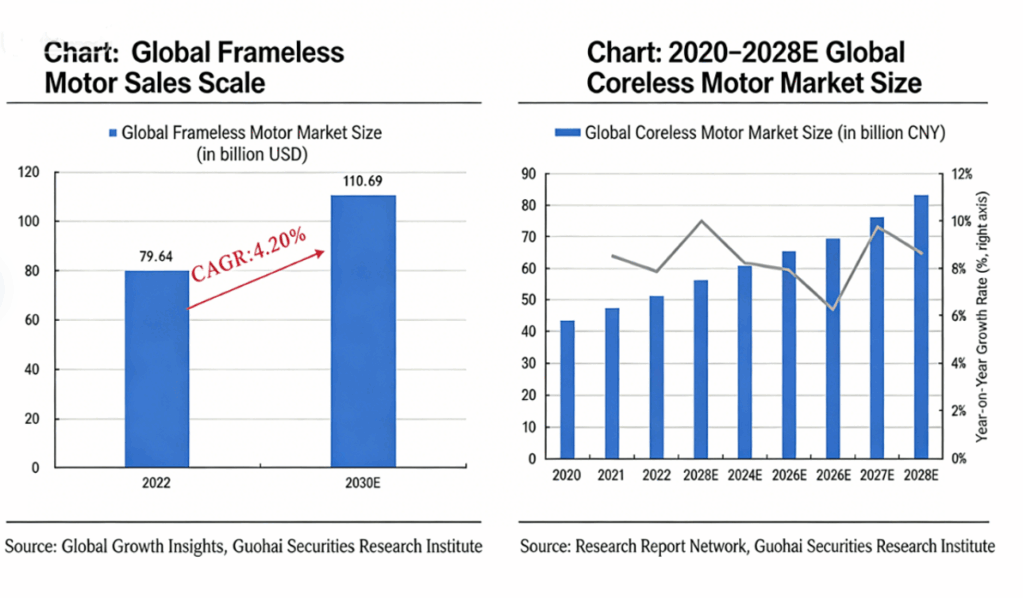
Tamaño del mercado global de motores sin marco y motores sin núcleo (de copa hueca)
Las articulaciones robóticas requieren motores de tamaño pequeño, alto par y respuesta rápida. Los motores de par sin carcasa son ligeros y de alta potencia, capaces de proporcionar un par mucho mayor a bajas velocidades, lo que los hace ideales para los robots humanoides. Los motores sin núcleo se caracterizan por su tamaño compacto y excelente rendimiento, lo que los hace especialmente adecuados para manos hábiles.