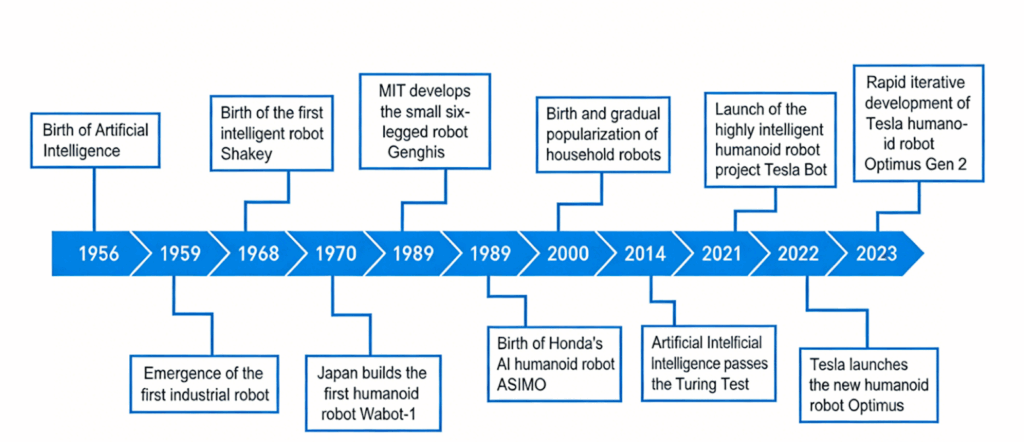
Les robots humanoïdes et leur histoire du développement
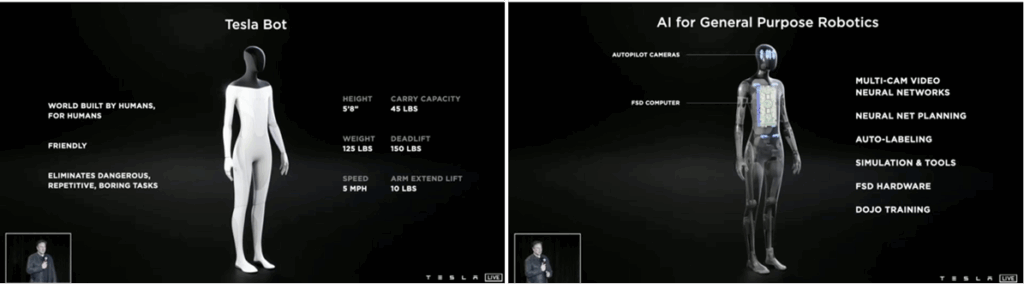
Les robots humanoïdes sont des robots dotés d’autonomie et d’une intelligence comparable à celle d’une personne. Concrètement, ce sont des robots capables de percevoir leur environnement et d’interagir avec lui, de planifier, de prendre des décisions et d’agir de manière autonome, avec des capacités d’exécution concrètes.
L’objectif principal des robots intelligents est de pouvoir comprendre le langage humain, décomposer les tâches, planifier les sous-tâches, reconnaître les objets en mouvement, interagir avec l’environnement et, finalement, accomplir les tâches assignées.
Décomposition structurelle des robots humanoïdes
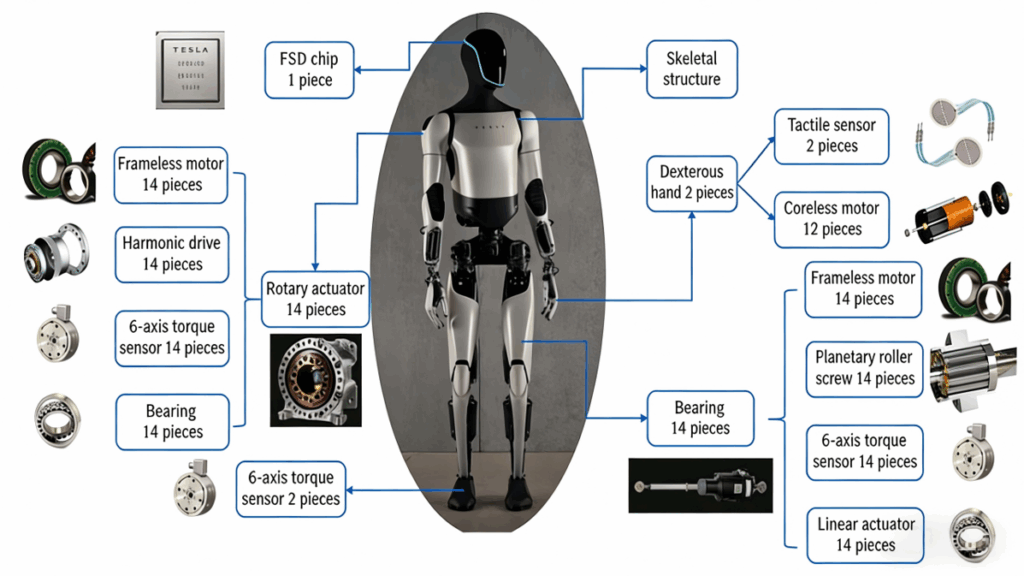
Application des matériaux à aimants permanents dans les robots humanoïdes (moteurs sans cadre)
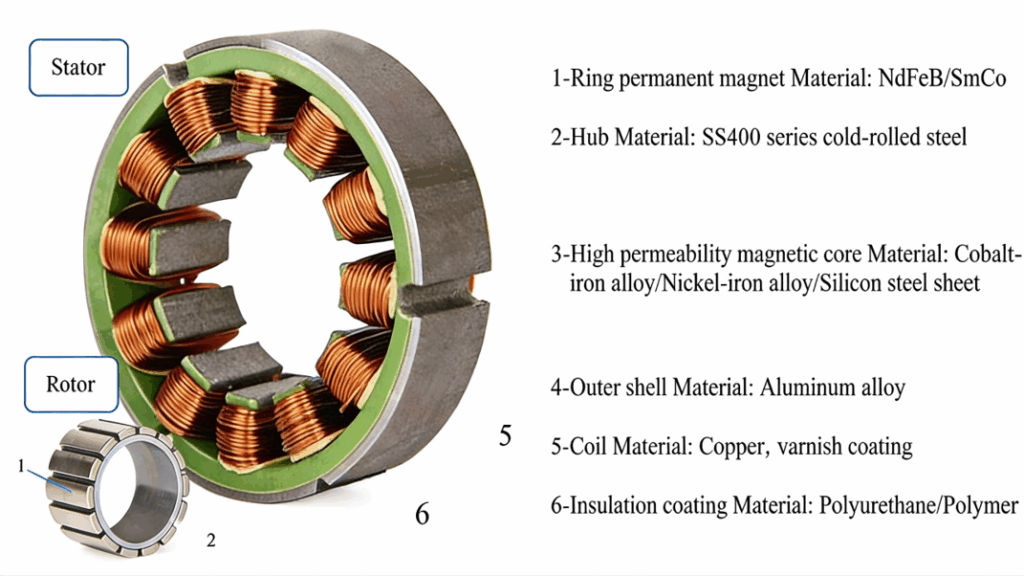
Moteur sans cadre : source d’énergie pour le fonctionnement de l’actionneur
Les moteurs sans carter sont la source d’énergie qui actionne les actionneurs des robots humanoïdes. Appartenant à la famille des servomoteurs, ils servent à actionner les articulations et les systèmes de mouvement de ces robots. Grâce à l’absence de carter et d’arbre traditionnels (et, dans certains modèles, de noyau en fer), les moteurs sans carter présentent une structure compacte et légère, permettant une densité de puissance plus élevée, une faible consommation d’énergie et un faible frottement.
Un moteur sans carter se compose uniquement d’un stator et d’un rotor. Le rotor est un anneau d’acier rotatif muni d’aimants permanents et monté directement sur l’arbre moteur. Le stator contient un noyau magnétique à haute perméabilité entouré d’enroulements de cuivre qui génèrent une force électromagnétique ; il est intégré de manière compacte au corps principal du moteur.
Application des matériaux magnétiques permanents aux robots humanoïdes (moteurs sans noyau)
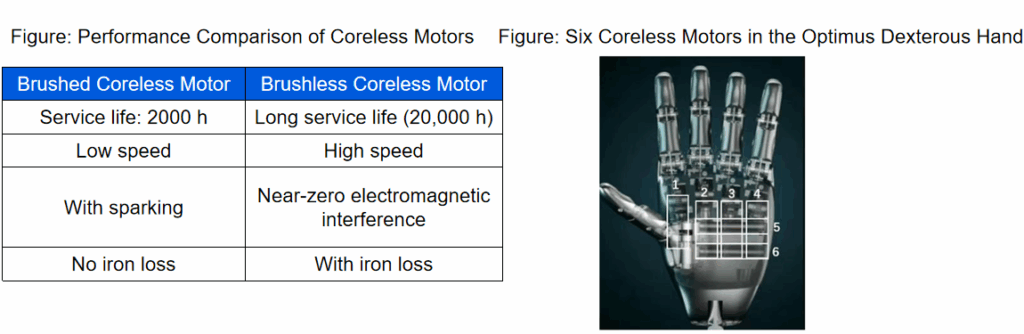
Les moteurs sans noyau sont des servomoteurs à courant continu à aimant permanent appartenant à la catégorie des micromoteurs spéciaux (leurs dimensions ne dépassant généralement pas 40 mm). Ils se caractérisent par leur petite taille, leur rendement élevé et leur faible niveau sonore, offrant ainsi d’excellentes performances en matière d’économie d’énergie, une grande réactivité, une commande aisée et un fonctionnement stable, ce qui représente un avantage technologique indéniable.
Par exemple, chacune des mains habiles de Tesla Optimus Elle est équipée de six articulations motorisées sans noyau, offrant à la main 11 degrés de liberté et permettant une manipulation plus flexible et précise.
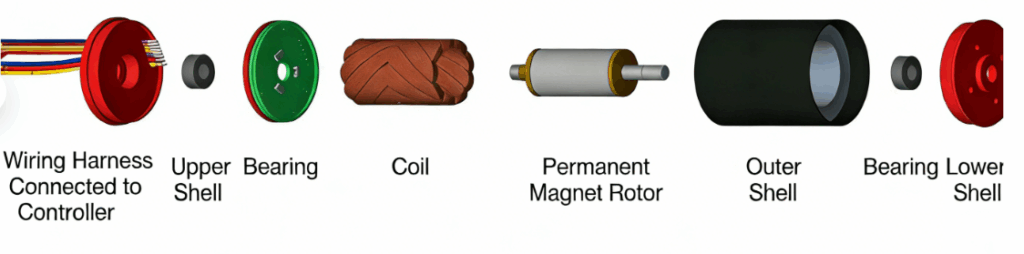
Les principaux composants d’un moteur sans noyau comprennent la bobine, le rotor, le boîtier et les capteurs à effet Hall. La bobine est constituée de fil émaillé de cuivre et de matériaux isolants. Le rotor est composé de matériaux magnétiques permanents et d’un noyau de fer ; les matériaux magnétiques permanents représentent la part la plus importante du coût.
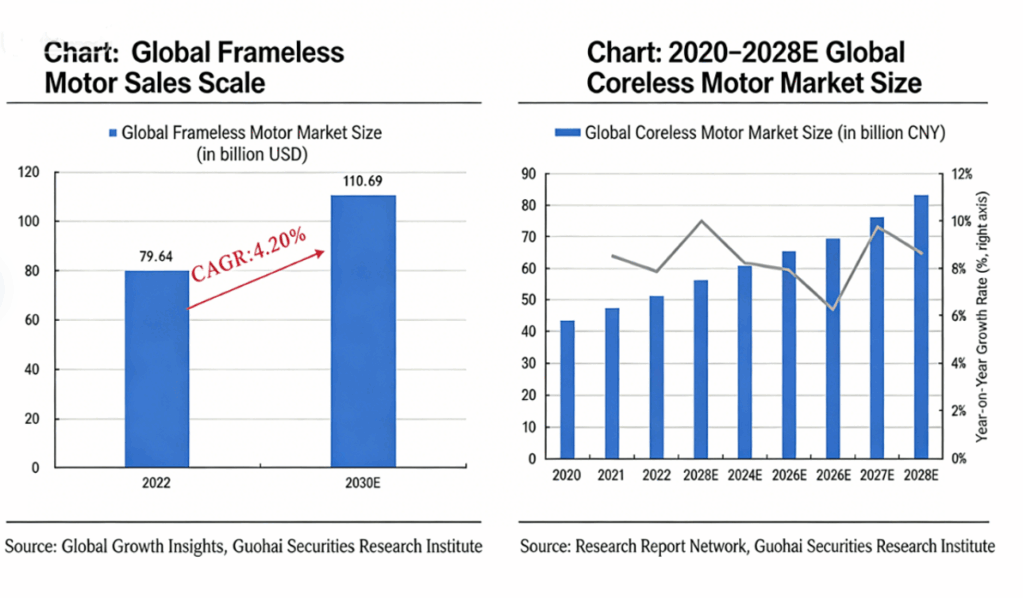
Taille du marché mondial des moteurs sans cadre et des moteurs sans noyau (à coupelle creuse)
Les articulations des robots nécessitent des moteurs compacts, à couple élevé et à réponse rapide. Les moteurs sans carter sont légers et puissants, et capables de fournir un couple important à bas régime, ce qui les rend parfaitement adaptés aux exigences des robots humanoïdes. Les moteurs sans noyau, quant à eux, se distinguent par leur compacité et leurs excellentes performances, les rendant particulièrement adaptés aux mains articulées.